kinematic_prediction.py
Last modified: 2023-07-15
View on GitHubThis file contains functions for kinematic prediction in the RoboX system.

{kind=link}
| Explanation | Code |
|---|---|
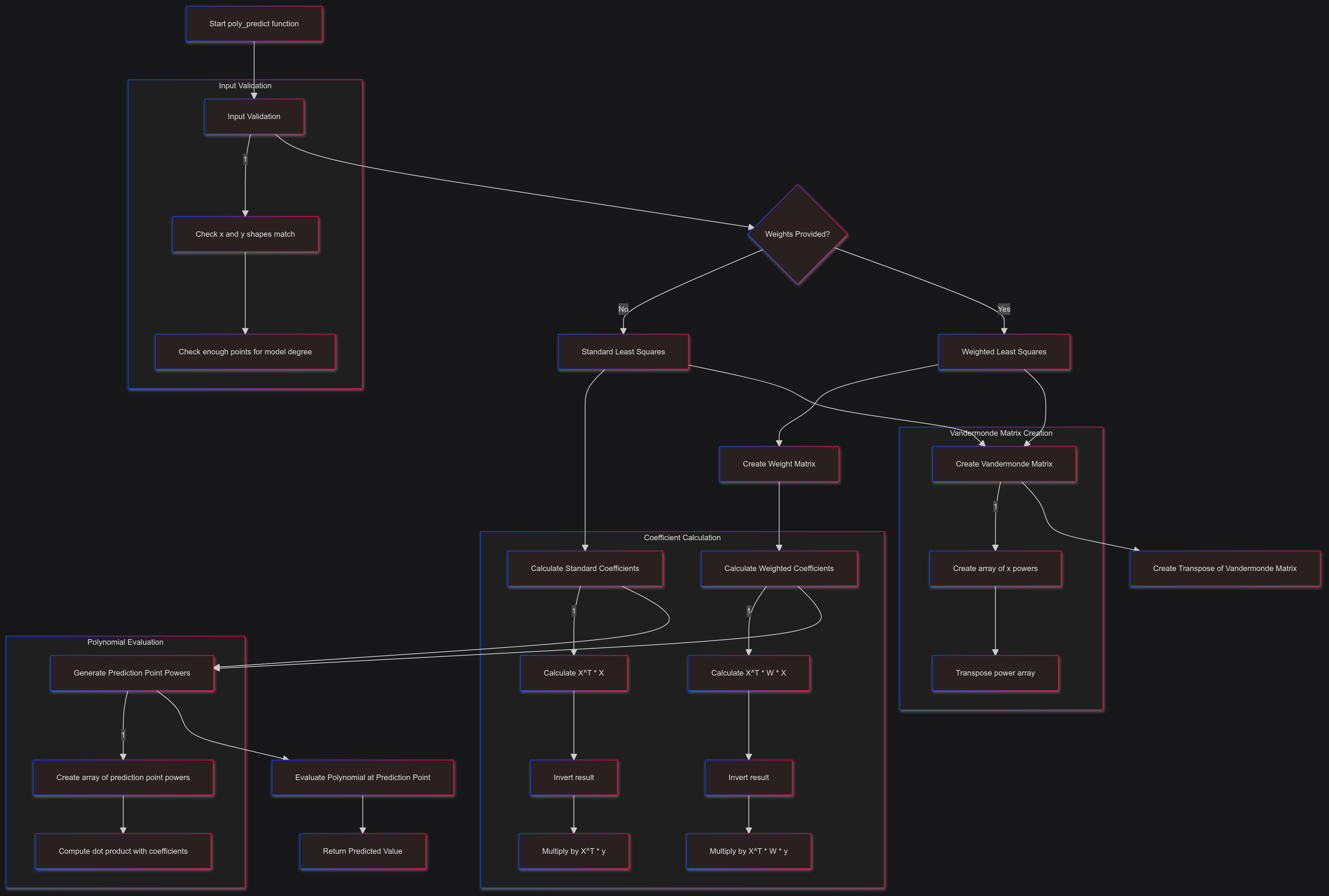
Ensure x and y have the same shape | |
Ensure there are enough points for the chosen model degree | |
Create the Vandermonde matrix | |
Each column represents x raised to powers from 0 to model_degree | |
Transpose of x_mat for matrix calculations | |
Standard least squares regression | |
Calculate coefficients using the normal equation: (X^T * X)^-1 * X^T * y | |
Weighted least squares regression | |
Create diagonal weight matrix | |
Calculate coefficients using the weighted normal equation: | |
(X^T * W * X)^-1 * X^T * W * y | |
Create array of powers of predict_x for polynomial evaluation | |
Evaluate the polynomial at predict_x using dot product | |
Test the poly_predict function | |
Perform a linear prediction (model_degree=1) at x=4.0 | |